Командные игры дронов
Командные Игры Дронов – это ежегодный всероссийский командный инженерный конкурс, посвященный разработке алгоритмов управления группами беспилотных аппаратов.
Командные Игры Дронов - это мероприятие для программистов, физиков, математиков и визионеров , способных открыть окно в мир группового применения беспилотных аппаратов.
Для кого проводится мероприятие
Любительская лига
Школьники старших классов, увлекающиеся беспилотными аппаратами и решением задач олимпиадного уровня
Профессиональная лига
Студенты инженерно-технических и естественно-научных ВУЗов, способные заставить слаженно работать группу скоростных дронов, при этом избегая столкновений
Экспертная лига
Выпускники ВУЗов, сотрудники технологических компаний и научных лабораторий, разрабатывающие беспилотные технологии
Как прошли Первые Командные Игры Дронов
Призовой фонд
1 000 000 руб.
а также специальные призы и подарки от партнеров
Дисциплины
Научно-практическая конференция
Научная секция
Секция "Интеллектуальные беспилотные системы" в рамках
64-ой Всероссийской научной конференции МФТИ.
Секция рассматривает работы, в которых изучается групповое управление, интеллектуальные системы управления, автономная навигация, системы технического зрения, картографирование и навигация для беспилотных систем, беспилотные летательные аппараты, беспилотные космические системы, автономные необитаемые подводные аппараты, беспилотные транспортные системы, робототехнические комплексы.
Заседание секции 26 ноября 2021 года.
Запись трансляции: https://youtu.be/vsNi7VAni9A

Практическая секция
Секция посвящена перспективам развития отечественного рынка беспилотных авиационных систем, практикам применения БЛА в промышленности, сельском хозяйстве и сфере безопасности, проблемам использования воздушного пространства Российской Федерации беспилотными воздушными судами и актуальным задачам в рамках утвержденной правительством инициативы «Беспилотная аэродоставка грузов».
Заседание секции 29 ноября 2021 года.
Прямая трансляция: https://youtu.be/W6v-cVKNbhQ
Таймлайн
- 08 ноябряНачало регистрации команд
Открытие доступа к тестовым задачам - 20 ноябряОкончание регистрации
- 22 ноябряОкончание приема решений
- 25 ноябряПубликация списка прошедших отбор команд
- 26 ноября
- 28 ноябряПрезентация решений экспертному жюри
Публикация списка команд-финалистов - 29 ноября
Спикеры и эксперты

Автайкин Сергей
Заведующий лабораторией перспективных систем управления МФТИ, заместитель заведующего кафедрой СУМГФ МФТИ

Анцев Василий
Руководитель направления беспилотных авиационных систем АО "НПП" Радар ммс"

Кириков Денис
Руководитель образовательной онлайн платформы Uavprof.com

Наумов Роман
Директор департамента БАС ФГБУ «НИЦ «Институт имени Н.Е. Жуковского»

Овчинников Денис
Руководитель центра учета беспилотных воздушных судов ФГУП «Госкорпорация по ОрВД»

Сиваев Евгений
Директор по развитию БАС АО “НПП" Радар ммс"

Потемкин Андрей
Советник генерального директора ООО "Авиателекоминвест"

Баутин Георгий
Руководитель департамента управления авиатранспортом АО «Почта России»

Чехов Антон
Директор проектов РТК ИТ ПАО "Ростелеком", ведущий эксперт лаборатории киберфизических систем ИПУ РАН

Семянников Василий
Директор по развитию ООО «АС-КАМ»

Киреев Артем
Директор "Центра компетенций в сфере применения беспилотных авиационных систем ТГУ имени Г.Р. Державина"

Благодарящев Игорь
Главный специалист департамента БАС ФГБУ «НИЦ «Институт имени Н.Е. Жуковского»

Хрипунов Алексей
Генеральный директор ООО Научно-исследовательский центр «Аэроскрипт»
Организаторы


Партнеры




Информационные партнеры


При поддержке
F.A.Q.
Отправляйте заявку, если вы учитесь или работаете по специальностям: IT, математика, инженерия, физика, а также хотите развиваться в этих областях.
Школьники и студенты не младше 14 лет. Участникам моложе 18 лет необходимо предоставить согласие от родителей не позднее, чем за день до начала соревнований.
Размер команды до 4 человек. Возможно самостоятельное участие, но мы рекомендуем принять участие в команде.
Конечно.
Умение программировать на C++ или Python. Опыт работы с ROS приветствуется, однако не требуется.
В мероприятии участвуют команды из физических лиц, а не организаций. Поэтому количество команд от одной организации не ограничено. Также команды могут быть смешанные из представителей разных организаций.
Синхронный полет
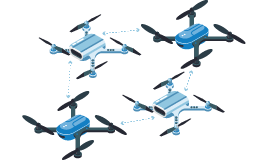
В рамках дисциплины «Синхронный полет» задача Команды разработать и запрограммировать алгоритм, позволяющий группе беспилотных аппаратов преодолеть гоночную трассу, выстраиваясь перед трибунами зрителей в геометрические формации различной сложности. Группа беспилотных аппаратов состоит из одинаковых аппаратов в количестве, определяемом заданием. Аппараты являются цифровыми двойниками реальных моделей беспилотных летательных аппаратов мультироторного типа.
Гоночная трасса представляет собой спортивный стадион.
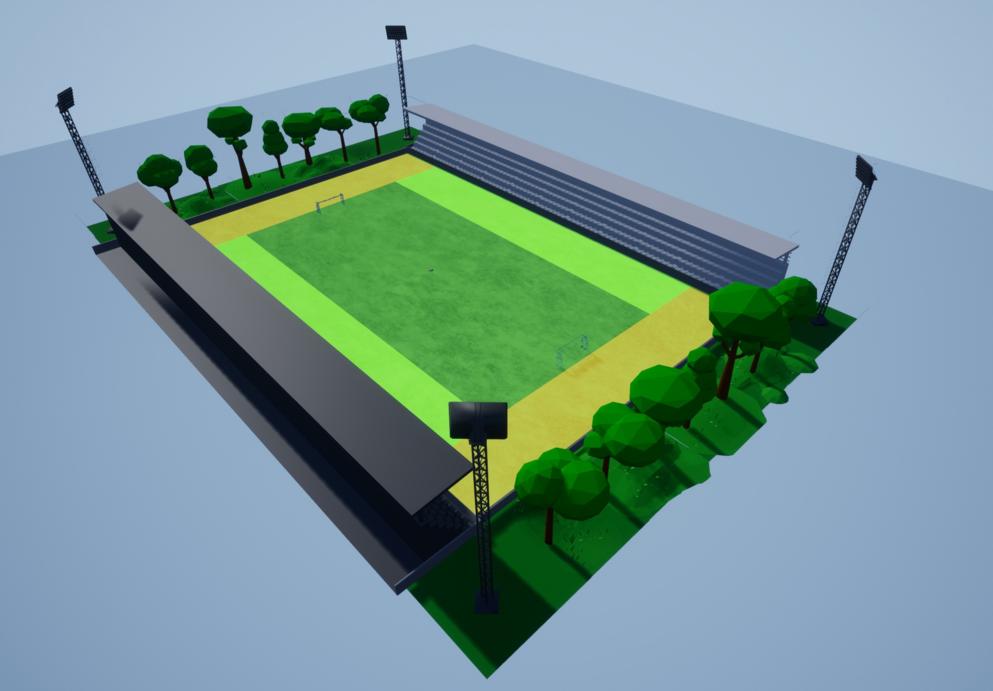
Полет группы аппаратов осуществляется над беговыми дорожками по направлению против часовой стрелки. Место старта находится за правыми футбольными воротами.

Зоны пролета - части беговых дорожек, отмеченные зеленым цветом. Над зонами пролета группа аппаратов должна двигаться поддерживая формацию (взаимное пространственное расположение) в соответствии с полученным заданием.
Зоны перестроения - части беговых дорожек, отмеченные желтым цветом. Пролетая над зонами перестроения, группа аппаратов должна перестроится в новую формацию в соответствии с полученным заданием.
Управление каждым аппаратом в группе происходит с помощью алгоритма, разрабатываемого Командой. Управляющие воздействия на аппараты выдаются в одном из следующих вариантов:
- по точкам в локальной системе координат;
- по точкам в глобальной системе координат;
- по скоростям в локальной и глобальной системах координат;
- по ускорениям;
- по тяге и ориентации/угловым скоростям аппарата.
Алгоритмы должны быть или уникальными или иметь принципиальные отличия от общедоступных.
Формации представляют собой совокупность точек пространства, в каждой из которых должен находиться один аппарат группы. При этом, где находится какой из аппаратов группы задается алгоритмом, разработанным участником соревнований. Виды формаций, выносимые на Соревнования, и количество аппаратов для их построения заранее не известны.
Задача Команды - разработать алгоритм управления группой аппаратов, который автоматически:
- распределит месторасположение аппаратов в каждой из формаций;
- выдаст управляющие воздействия на аппараты для поддержания формаций;
- выдаст управляющие воздействия на аппараты для перестроения между формациями;
- выдаст управляющие воздействия на аппараты для перемещения по гоночной трассе для выполнения полного полетного задания.
Для Любительской лиги при запуске Симулятора выдается полное полетное задание в виде последовательности и набора необходимых для выполнения формаций. В каждой зоне пролета (до выхода из нее) должна поддерживаться одна формация согласно полученному полетному заданию. После чего в зоне перестроения должно быть выполнено перестроение в следующую по полетному заданию формацию и ее поддержание в ближайшей зоне пролета по направлению движения (показано стрелками).
Для Профессиональной лиги при запуске Симулятора автоматически выдается полетное задание в виде необходимой для выполнения формаций в ближайшей зоне пролета по направлению движения (показано стрелками). В тот момент, когда один из аппаратов переходит из зоны пролета в зону перестроения (красные линии), публикуется следующая необходимая для выполнения формация в ближайшей зоне пролета по направлению движения.
При определении победителя оцениваются точность поддержания формации и время прохождения всей трассы. Побеждает команда, набравшая большее число баллов.
Баллы начисляются или снимаются за следующие действия:
- точность поддержания формации в зонах пролета (за каждую формацию);
- время поддержания формации в зонах пролета (за каждую формацию);
- время преодоления зон перестроения (за каждую зону);
- количество аппаратов вылетевших за рамки зон пролета и перестроения;
- время нахождения аппаратов вне зон пролета и перестроения;
- столкновения аппаратов.
Для отбора в финал нужно зарегистрироваться до 20 ноября и прислать решение тестовой задачи до 22 ноября.
Решения тестовых заданий необходимо отправлять через форму https://forms.gle/RsRcncF4uQpXgAtVA (требуется учетная запись пользователя Google).
Синхронный полет
В рамках дисциплины «Синхронный полет» задача Команды разработать и запрограммировать алгоритм, позволяющий группе беспилотных аппаратов преодолеть гоночную трассу, выстраиваясь перед трибунами зрителей в геометрические формации различной сложности. Группа беспилотных аппаратов состоит из одинаковых аппаратов в количестве, определяемом заданием. Аппараты являются цифровыми двойниками реальных моделей беспилотных летательных аппаратов мультироторного типа.
Гоночная трасса представляет собой спортивный стадион.
Полет группы аппаратов осуществляется над беговыми дорожками по направлению против часовой стрелки. Место старта находится за правыми футбольными воротами.
Зоны пролета - части беговых дорожек, отмеченные зеленым цветом. Над зонами пролета группа аппаратов должна двигаться поддерживая формацию (взаимное пространственное расположение) в соответствии с полученным заданием.
Зоны перестроения - части беговых дорожек, отмеченные желтым цветом. Пролетая над зонами перестроения, группа аппаратов должна перестроится в новую формацию в соответствии с полученным заданием.
Управление каждым аппаратом в группе происходит с помощью алгоритма, разрабатываемого Командой. Управляющие воздействия на аппараты выдаются в одном из следующих вариантов:
- по точкам в локальной системе координат;
- по точкам в глобальной системе координат;
- по скоростям в локальной и глобальной системах координат;
- по ускорениям;
- по тяге и ориентации/угловым скоростям аппарата.
Алгоритмы должны быть или уникальными или иметь принципиальные отличия от общедоступных.
Формации представляют собой совокупность точек пространства, в каждой из которых должен находиться один аппарат группы. При этом, где находится какой из аппаратов группы задается алгоритмом, разработанным участником соревнований. Виды формаций, выносимые на Соревнования, и количество аппаратов для их построения заранее не известны.
Задача Команды - разработать алгоритм управления группой аппаратов, который автоматически:
- распределит месторасположение аппаратов в каждой из формаций;
- выдаст управляющие воздействия на аппараты для поддержания формаций;
- выдаст управляющие воздействия на аппараты для перестроения между формациями;
- выдаст управляющие воздействия на аппараты для перемещения по гоночной трассе для выполнения полного полетного задания.
Для Любительской лиги при запуске Симулятора выдается полное полетное задание в виде последовательности и набора необходимых для выполнения формаций. В каждой зоне пролета (до выхода из нее) должна поддерживаться одна формация согласно полученному полетному заданию. После чего в зоне перестроения должно быть выполнено перестроение в следующую по полетному заданию формацию и ее поддержание в ближайшей зоне пролета по направлению движения (показано стрелками).
Для Профессиональной лиги при запуске Симулятора автоматически выдается полетное задание в виде необходимой для выполнения формаций в ближайшей зоне пролета по направлению движения (показано стрелками). В тот момент, когда один из аппаратов переходит из зоны пролета в зону перестроения (красные линии), публикуется следующая необходимая для выполнения формация в ближайшей зоне пролета по направлению движения.
При определении победителя оцениваются точность поддержания формации и время прохождения всей трассы. Побеждает команда, набравшая большее число баллов.
Баллы начисляются или снимаются за следующие действия:
- точность поддержания формации в зонах пролета (за каждую формацию);
- время поддержания формации в зонах пролета (за каждую формацию);
- время преодоления зон перестроения (за каждую зону);
- количество аппаратов вылетевших за рамки зон пролета и перестроения;
- время нахождения аппаратов вне зон пролета и перестроения;
- столкновения аппаратов.
Для отбора в финал нужно зарегистрироваться до 20 ноября и прислать решение тестовой задачи до 22 ноября.
Решения тестовых заданий необходимо отправлять через форму https://forms.gle/RsRcncF4uQpXgAtVA (требуется учетная запись пользователя Google).
Командная гонка
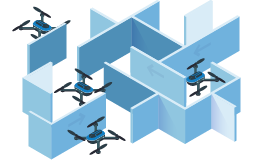
В рамках дисциплины «Командная гонка» задача Команды разработать и продемонстрировать работоспособность алгоритма, позволяющего группе беспилотных аппаратов преодолеть многосекционный лабиринт, разделенный перегородками с отверстиями, с использованием технического зрения. В тестовом задании группа беспилотных аппаратов состоит из одинаковых аппаратов в количестве определяемом заданием. Аппараты являются цифровыми двойниками реальных моделей беспилотных летательных аппаратов мультироторного типа.
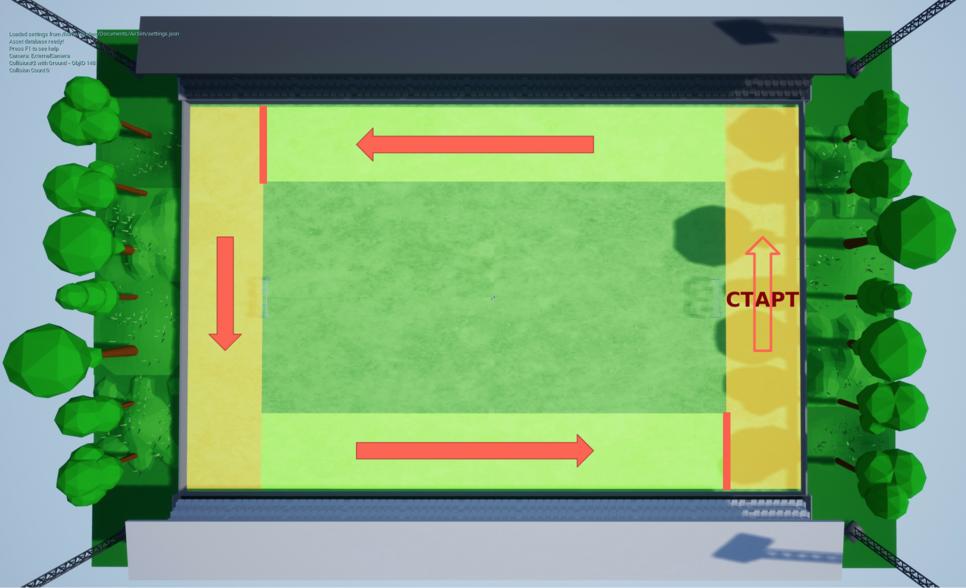
Гоночная трасса представляет собой многосекционный лабиринт, разделенный перегородками с отверстиями.
Полет группы аппаратов осуществляется по лабиринту начиная со взлетной площадки до посадочной площадки (стена примыкающая площадке по ходу движения отмечена QR-кодом).

Поперечные размеры лабиринта 20 на 20 метров, длина и конфигурация лабиринта зависит от количества перегородок и заранее не известна.
Перегородки в лабиринте содержат разноформатные сквозные отверстия через которые необходимо пролетать перестраивая группу аппаратов. На примере изображена перегородка с отверстиями в виде стилизованной буквы Т. Количество и конфигурация отверстий в перегородке заранее не известно.

Отверстия в перегородках участникам не выдаются и одна задач - самостоятельно определять отверстия по камерам, установленным на аппарате.
Перегородки могут содержать отверстия, в которые отдельно взятый аппарат не может пролететь из-за габаритных ограничений, поэтому в алгоритме управления необходимо будет делать проверку для исключения таких отверстий из маршрута полета группы.
Стены, пол и потолок лабиринта являются непроходимой преградой для аппаратов и на них работает механизм упругого столкновения.
В Профессиональной лиге для передачи конфигурации лабиринта между перегородками используется механизм центральных линий. Центральная линия – это виртуальная линия, длины перпендикуляров от которой к стенам, полу и потолку лабиринта равны. Каждая центральная линия последним отрезком упирается в стену с отверстиями и перпендикулярна ей, последняя центральная линия упирается в глухую стену.
Управление каждым аппаратом в группе происходит с помощью алгоритма, разрабатываемого Командой.
Управляющие воздействия на аппараты выдаются в одном из следующих вариантов:
- по точкам в локальной системе координат;
- по точкам в глобальной системе координат;
- по скоростям в локальной и глобальной системах координат;
- по ускорениям;
- по тяге и ориентации/угловым скоростям аппарата.
Алгоритмы должны быть или уникальными или иметь принципиальные отличия от общедоступных.
Формации представляют собой совокупность точек пространства, в каждой из которых должен находиться один аппарат группы. При этом, где находится какой из аппаратов группы задается алгоритмом, разработанным участником соревнований. Какой вид и пространственную конфигурацию формации использовать для прохождения каждой из перегородок должно рассчитываться в алгоритме управления группой, исходя из анализа расположения отверстий в перегородках между секциями лабиринта.
Задача Команды - разработать алгоритм управления группой аппаратов, который автоматически:
- обнаружит отверстия в перегородках между секциями лабиринта;
- проанализирует расположение отверстий;
- распределит месторасположение аппаратов в каждой из формаций для оптимального пролета через отверстия в каждой из перегородок;
- выдаст управляющие воздействия на аппараты для поддержания формаций;
- выдаст управляющие воздействия на аппараты для перестроения между формациями;
- выдаст управляющие воздействия на аппараты для перемещения по гоночной трассе с площадки взлета до посадочной площадки преодолевая перегородки.
Задача группы аппаратов - преодолеть лабиринт начиная с площадки взлета и до посадочной площадки, пролетая сквозь отверстия в перегородках за счет перестроения в разные формации.
Для Профессиональной лиги при запуске Симулятора автоматически выдается полетное задание в виде центральной линии. Как только любой из аппаратов группы пролетает сквозь перегородку, происходит выдача следующей центральной линии.
Участникам Экспертной лиги необходимо используя камеры, установленные на аппарате, самостоятельно определять не только отверстия, но и маршрут, без использования центральных линий.
При определении победителя оценивается время прохождения трассы. Побеждает команда, набравшая большее число баллов.
Баллы начисляются или снимаются за следующие действия:
- количество пройденных секций лабиринта;
- время преодоления секций лабиринта (за каждую секцию);
- повторное прохождение через одно и то же отверстие (необходимо минимизировать повторные пролеты в одно и тоже отверстие);
- столкновения с элементами гоночной трассы;
- столкновения аппаратов.
Для отбора в финал нужно зарегистрироваться до 20 ноября и прислать решение тестовой задачи до 22 ноября.
Решения тестовых заданий необходимо отправлять через форму https://forms.gle/RsRcncF4uQpXgAtVA (требуется учетная запись пользователя Google).
Распределенная картография
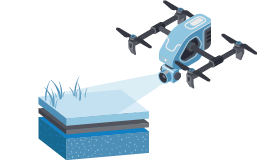
В рамках задания «Съемка местности» задача Команды разработать и запрограммировать алгоритм управления, позволяющий беспилотному летательному аппарату провести площадную аэрофотосъемку (АФС) с учетом требований за минимальное время. В тестовом задании группа беспилотных аппаратов состоит из одинаковых аппаратов в количестве определяемом заданием. Аппараты являются цифровыми двойниками реальных моделей беспилотных летательных аппаратов мультироторного типа.
Площадная аэрофотосъемка - это выполнение непрерывной серии снимков при полете галсами над заданной территорией. Целью АФС площадных объектов является создание точных пространственных цифровых моделей местности. Одним из требований при такой съемке является поддержание определенного угла галсирования (относительно направления на север). Угол галсирования определяется как отклонение направления галсирования от направления на север по часовой стрелке. Требуемое разрешение снимков, разрешение и угол обзора камеры, а также угол галсирования выдаются автоматически при запуске Симулятора.
Для учета рельефа при построении траектории предоставляется карта высот в виде png-изображения. Изображение является двумерным массивом данных (ось X - строка слева направо, ось Y - столбец сверху вниз). Разрешение карты - 1.28 метра х 1.28 метра. Направление на Север соответствует оси X.
Полигон представляет собой участок горной местности. Зона АФС представляет собой многоугольник, заданный координатами его вершин. Полет начинается при покидании аппаратом стартовой зоны и заканчивается при посадке аппарата в зоне посадки. Стартовая зона и зона посадки являются прямоугольниками и заданы координатами противолежащих вершин. При выполнении полета требуется нахождение аппарата в допустимой зоне. Допустимая зона включает в себя зону АФС и пространство вокруг зоны АФС не дальше расстояния R от нее. Помимо зоны АФС задаются запретные зоны, нахождение внутри которых не допускается. Запретные зоны представляют собой многоугольники или круги, заданные координатами вершин или координатами центра и радиусом соответственно. Значение R, координаты зоны АФС, стартовой зоны, зоны посадки и запретных зон выдаются автоматически при запуске Симулятора.
Управление каждым аппаратом в группе происходит с помощью алгоритма, разрабатываемого Командой.
Управляющие воздействия на аппараты выдаются в одном из следующих вариантов:
- по точкам в локальной системе координат;
- по точкам в глобальной системе координат;
- по скоростям в локальной и глобальной системах координат;
- по ускорениям;
- по тяге и ориентации/угловым скоростям аппарата.
Алгоритмы должны быть или уникальными или иметь принципиальные отличия от общедоступных.
Задача Команды разработать алгоритм управления аппаратом, который автоматически:
- построит маршрут полета с учетом зоны АФС, стартовой зоны, зоны посадки и запретных зон, а также угла галсирования;
- выдаст управляющее воздействие на аппарат для перемещения по построенному маршруту;
- выдаст управляющее воздействие на аппарат для запуска и прекращения процесса съемки.
Для Профессиональной Лиги запретные зоны отсутствуют.
Для Экспертной Лиги запретные зоны присутствуют.
При определении победителя оценивается доля не закрашенной зоны АФС и время полета. Побеждает команда, набравшая наибольшее число баллов.
Баллы начисляются или снимаются за следующие действия:
- общее время полета;
- время нахождения вне допустимой зоны;
- соответствие направления съемки требуемому углу галсирования;
- доля не закрашенной зоны АФС.
Для отбора в финал нужно зарегистрироваться до 20 ноября и прислать решение тестовой задачи до 22 ноября.
Решения тестовых заданий необходимо отправлять через форму https://forms.gle/RsRcncF4uQpXgAtVA (требуется учетная запись пользователя Google).
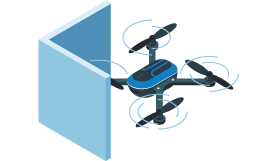
Уход от столкновения
В рамках задания «Уход от столкновения» задача Команды разработать и запрограммировать алгоритм управления, позволяющий беспилотному летательному аппарату пролететь заданный маршрут, избежав столкновений с динамическими летящими препятствиями (БЛА/птицами). В тестовом задании группа беспилотных аппаратов состоит из одинаковых аппаратов в количестве определяемом заданием. Аппараты являются цифровыми двойниками реальных моделей беспилотных летательных аппаратов мультироторного типа.
Полигон представляет собой участок горной местности.
Маршрут представляет собой ломаную линию, заданную координатами ее вершин (точек маршрута). Полет по маршруту начинается при пересечении аппаратом стартовой плоскости и заканчивается при пересечении аппаратом финишной плоскости. При полете по маршруту требуется строгое поддержание траектории. Допустимая зона находится вокруг линии маршрута не дальше некоторого расстояния R от нее. Значение R и координаты точек маршрута выдаются автоматически при запуске Симулятора.
В качестве динамических препятствий выступают БЛА/птицы, движущиеся по своим траекториям, не зависящим от перемещений аппарата.
Управление каждым аппаратом в группе происходит с помощью алгоритма, разрабатываемого Командой.
Управляющие воздействия на аппараты выдаются в одном из следующих вариантов:
- по точкам в локальной системе координат;
- по точкам в глобальной системе координат;
- по скоростям в локальной и глобальной системах координат;
- по ускорениям;
- по тяге и ориентации/угловым скоростям аппарата.
Алгоритмы должны быть или уникальными или иметь принципиальные отличия от общедоступных.
Задача Команды разработать алгоритм управления аппаратом, который автоматически:
- выдаст управляющее воздействие на аппарат для перемещения по маршруту;
- определит динамические препятствия, с которыми может произойти столкновение;
- выдаст управляющее воздействие для избегания столкновений.
Для Профессиональной Лиги положение динамических препятствий, а также их габаритные размеры выдаются в течение полета аппарата, при нахождении препятствия на расстоянии обнаружения L от аппарата. Значение L выдается автоматически при запуске Симулятора.
Для Экспертной Лиги параметры динамических препятствий необходимо определять с помощью оптических камер аппарата.
При определении победителя оценивается число столкновений с препятствиями и время полета. Побеждает команда, набравшая наибольшее число баллов.
Баллы начисляются или снимаются за следующие действия:
- общее время полета по маршруту;
- среднеквадратичное отклонение траектории аппарата от маршрута;
- число столкновений с препятствиями;
- время нахождения аппарата вне допустимой зоны (критический критерий, при высоких значениях параметра жюри может принять решение о признании результата недействительным).
Для отбора в финал нужно зарегистрироваться до 20 ноября и прислать решение тестовой задачи до 22 ноября.
Решения тестовых заданий необходимо отправлять через форму https://forms.gle/RsRcncF4uQpXgAtVA (требуется учетная запись пользователя Google).
Беспилотная аэродоставка грузов
В рамках задания «Адаптивный полет с грузом» задача Команды разработать и запрограммировать алгоритм управления, позволяющий беспилотному летательному аппарату пролететь по маршруту и сбросить груз наиболее близко к заданной точке за минимальное время. В тестовом задании группа беспилотных аппаратов состоит из одинаковых аппаратов в количестве определяемом заданием. Аппараты являются цифровыми двойниками реальных моделей беспилотных летательных аппаратов мультироторного типа.
В данном задании аппарат оснащен двигателем внутреннего сгорания и использует горючее топливо ввиду чего в течение полета постоянно изменяются его инерциальные характеристики. К аппарату прикреплен груз, который необходимо сбросить во время полета. Сброс груза также ведет к изменению инерциальных характеристик аппарата. Начальная масса аппарата и масса груза выдаются автоматически при запуске Симулятора.
Полигон представляет собой участок горной местности.
Маршрут представляет собой кубический сплайн, заданный его характеристиками. Полет по маршруту начинается при пересечении аппаратом стартовой плоскости и заканчивается при пересечении аппаратом финишной плоскости. При полете по маршруту требуется строгое поддержание траектории. Допустимая зона находится вокруг линии маршрута не дальше некоторого расстояния R от нее. Значение R и характеристики маршрута выдаются автоматически при запуске Симулятора.
Во время полета необходимо сбросить груз в точку назначения. Сброс груза происходит по команде управляющего алгоритма.
Управление каждым аппаратом в группе происходит с помощью алгоритма, разрабатываемого Командой.
Управляющие воздействия на аппараты выдаются в одном из следующих вариантов:
- по точкам в локальной системе координат;
- по точкам в глобальной системе координат;
- по скоростям в локальной и глобальной системах координат;
- по ускорениям;
- по тяге и ориентации/угловым скоростям аппарата.
Алгоритмы должны быть или уникальными или иметь принципиальные отличия от общедоступных.
Задача Команды разработать алгоритм управления аппаратом, который автоматически:
- выдаст управляющее воздействие на аппарат для перемещения по маршруту;
- определит оптимальную точку сброса груза;
- выдаст команду для сброса груза.
Для Профессиональной Лиги в течение полета аппарата выдается масса израсходованного топлива. Координаты точки назначения выдаются автоматически при запуске Симулятора.
Для Экспертной Лиги в течение полета аппарата выдается мгновенный расход топлива. Координаты точки назначения выдаются при приближении аппарата к ней на расстояние L. Значение L выдается автоматически при запуске Симулятора.
При определении победителя оценивается точность приземления груза и время полета. Побеждает команда, набравшая наибольшее число баллов.
Баллы начисляются или снимаются за следующие действия:
- общее время полета по маршруту;
- среднеквадратичное отклонение траектории аппарата от маршрута;
- среднеквадратичное отклонение точки приземления груза от точки назначения;
- время нахождения аппарата вне допустимой зоны (Критический критерий, при высоких значениях параметра жюри может принять решение о признании результата недействительным).
Для отбора в финал нужно зарегистрироваться до 20 ноября и прислать решение тестовой задачи до 22 ноября.
Решения тестовых заданий необходимо отправлять через форму https://forms.gle/RsRcncF4uQpXgAtVA (требуется учетная запись пользователя Google).
Творческий конкурс
Описание
«Зачем нужны группы беспилотных аппаратов?» — это конкурс по поиску новых идей гражданского применения беспилотных технологий, направленный на создание благоприятных условий для успешной самореализации и поиск способов повышения качества жизни.
Творческий конкурс идей «Зачем нужны группы беспилотных аппаратов?» – проект, в рамках которого любой человек вне зависимости от возраста, места проживания, образования и рода деятельности может описать свою уникальную концепцию беспилотных технологий будущего.
Задание
В рамках конкурса участники должны предложить и раскрыть идею применения групп беспилотных аппаратов в гражданской сфере. Для этого сначала выберите любую из отраслей экономики, при этом масштаб не имеет значения, то есть это может быть, как сельское хозяйство, так и животноводство или именно оленеводство (возможен выбор нескольких отраслей, если он будет обоснован). Определите проблему, существующую в данной отрасли, которую можно решить, используя группу (или группы) беспилотных аппаратов. Разработайте и обоснуйте решение описанной проблемы. Выделите, в чем заключается преимущество применения групп.
Условия
В конкурсе могут принять участие физические лица как индивидуально, так и в составе авторских коллективов.
Один участник/коллектив может подать не более одной заявки.
Требования
Участникам необходимо подготовить презентацию (конкурсное предложение) до 10 слайдов в формате pdf. Презентация должна содержать текстовое описание проблемы, текстовое описание замысла, обоснование применения группы беспилотных аппаратов.
Рекомендуется отправить конкурсное предложение с достаточным запасом времени до истечения срока. Конкурсные предложения должны быть присланы до 22 ноября до 23:59 по московскому времени.
Название pdf-файла презентации с материалами проекта-идеи должно совпадать с названием команды.
На первом слайде pdf-файла презентации должны быть указаны ФИО всех авторов проекта-идеи.
Конкурсные предложения, присланные позднее или с нарушениями требований к подаче, будут отклонены.
Командная гонка
В рамках дисциплины «Командная гонка» задача Команды разработать и продемонстрировать работоспособность алгоритма, позволяющего группе беспилотных аппаратов преодолеть многосекционный лабиринт, разделенный перегородками с отверстиями, с использованием технического зрения. В тестовом задании группа беспилотных аппаратов состоит из одинаковых аппаратов в количестве определяемом заданием. Аппараты являются цифровыми двойниками реальных моделей беспилотных летательных аппаратов мультироторного типа.
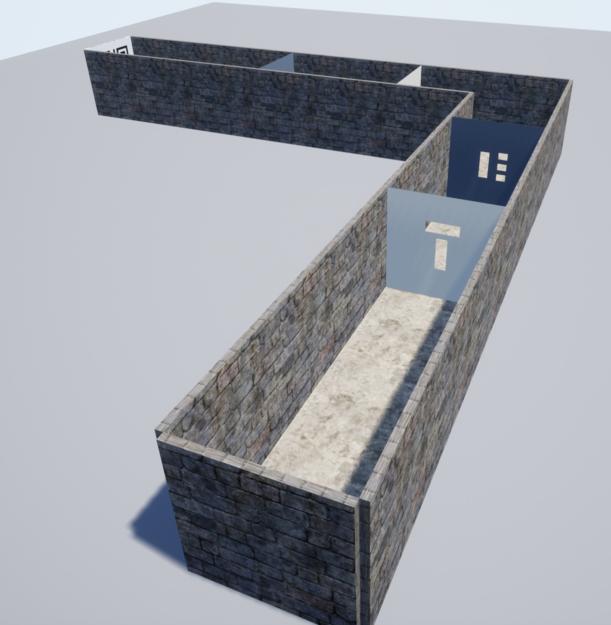
Гоночная трасса представляет собой многосекционный лабиринт, разделенный перегородками с отверстиями.
Полет группы аппаратов осуществляется по лабиринту начиная со взлетной площадки до посадочной площадки (стена примыкающая площадке по ходу движения отмечена QR-кодом).
Поперечные размеры лабиринта 20 на 20 метров, длина и конфигурация лабиринта зависит от количества перегородок и заранее не известна.
Перегородки в лабиринте содержат разноформатные сквозные отверстия через которые необходимо пролетать перестраивая группу аппаратов. На примере изображена перегородка с отверстиями в виде стилизованной буквы Т. Количество и конфигурация отверстий в перегородке заранее не известно.
Отверстия в перегородках участникам не выдаются и одна задач - самостоятельно определять отверстия по камерам, установленным на аппарате.
Перегородки могут содержать отверстия, в которые отдельно взятый аппарат не может пролететь из-за габаритных ограничений, поэтому в алгоритме управления необходимо будет делать проверку для исключения таких отверстий из маршрута полета группы.
Стены, пол и потолок лабиринта являются непроходимой преградой для аппаратов и на них работает механизм упругого столкновения.
В Профессиональной лиге для передачи конфигурации лабиринта между перегородками используется механизм центральных линий. Центральная линия – это виртуальная линия, длины перпендикуляров от которой к стенам, полу и потолку лабиринта равны. Каждая центральная линия последним отрезком упирается в стену с отверстиями и перпендикулярна ей, последняя центральная линия упирается в глухую стену.
Управление каждым аппаратом в группе происходит с помощью алгоритма, разрабатываемого Командой.
Управляющие воздействия на аппараты выдаются в одном из следующих вариантов:
- по точкам в локальной системе координат;
- по точкам в глобальной системе координат;
- по скоростям в локальной и глобальной системах координат;
- по ускорениям;
- по тяге и ориентации/угловым скоростям аппарата.
Алгоритмы должны быть или уникальными или иметь принципиальные отличия от общедоступных.
Формации представляют собой совокупность точек пространства, в каждой из которых должен находиться один аппарат группы. При этом, где находится какой из аппаратов группы задается алгоритмом, разработанным участником соревнований. Какой вид и пространственную конфигурацию формации использовать для прохождения каждой из перегородок должно рассчитываться в алгоритме управления группой, исходя из анализа расположения отверстий в перегородках между секциями лабиринта.
Задача Команды - разработать алгоритм управления группой аппаратов, который автоматически:
- обнаружит отверстия в перегородках между секциями лабиринта;
- проанализирует расположение отверстий;
- распределит месторасположение аппаратов в каждой из формаций для оптимального пролета через отверстия в каждой из перегородок;
- выдаст управляющие воздействия на аппараты для поддержания формаций;
- выдаст управляющие воздействия на аппараты для перестроения между формациями;
- выдаст управляющие воздействия на аппараты для перемещения по гоночной трассе с площадки взлета до посадочной площадки преодолевая перегородки.
Задача группы аппаратов - преодолеть лабиринт начиная с площадки взлета и до посадочной площадки, пролетая сквозь отверстия в перегородках за счет перестроения в разные формации.
Для Профессиональной лиги при запуске Симулятора автоматически выдается полетное задание в виде центральной линии. Как только любой из аппаратов группы пролетает сквозь перегородку, происходит выдача следующей центральной линии.
Участникам Экспертной лиги необходимо используя камеры, установленные на аппарате, самостоятельно определять не только отверстия, но и маршрут, без использования центральных линий.
При определении победителя оценивается время прохождения трассы. Побеждает команда, набравшая большее число баллов.
Баллы начисляются или снимаются за следующие действия:
- количество пройденных секций лабиринта;
- время преодоления секций лабиринта (за каждую секцию);
- повторное прохождение через одно и то же отверстие (необходимо минимизировать повторные пролеты в одно и тоже отверстие);
- столкновения с элементами гоночной трассы;
- столкновения аппаратов.
Для отбора в финал нужно зарегистрироваться до 20 ноября и прислать решение тестовой задачи до 22 ноября.
Решения тестовых заданий необходимо отправлять через форму https://forms.gle/RsRcncF4uQpXgAtVA (требуется учетная запись пользователя Google).